主题
BeyondMimic 全品类人形机器人仿真训练
一键进入镜像环境
https://www.gpufree.cn/images/101317

一、前置环境总览
1.1 平台配置要求
服务器型号:推荐 L40(48G)、RTX 4090(24G)
存储要求:系统盘 ≥ 30GB,数据盘 ≥ 50GB(用于存储镜像、模型、运动数据)
网络要求:公网 IP 可访问,支持 SSH、Desktop、JupyterLab 登录
1.2 镜像说明
镜像名称:Mini-Pi-Plus_BeyondMimic(50GB 专用镜像)
内置组件:IsaacLab、MuJoCo、BeyondMimic、RSL-RL
预装依赖:CUDA 12.8、Conda、Python 3.8、PyTorch 2.1.0
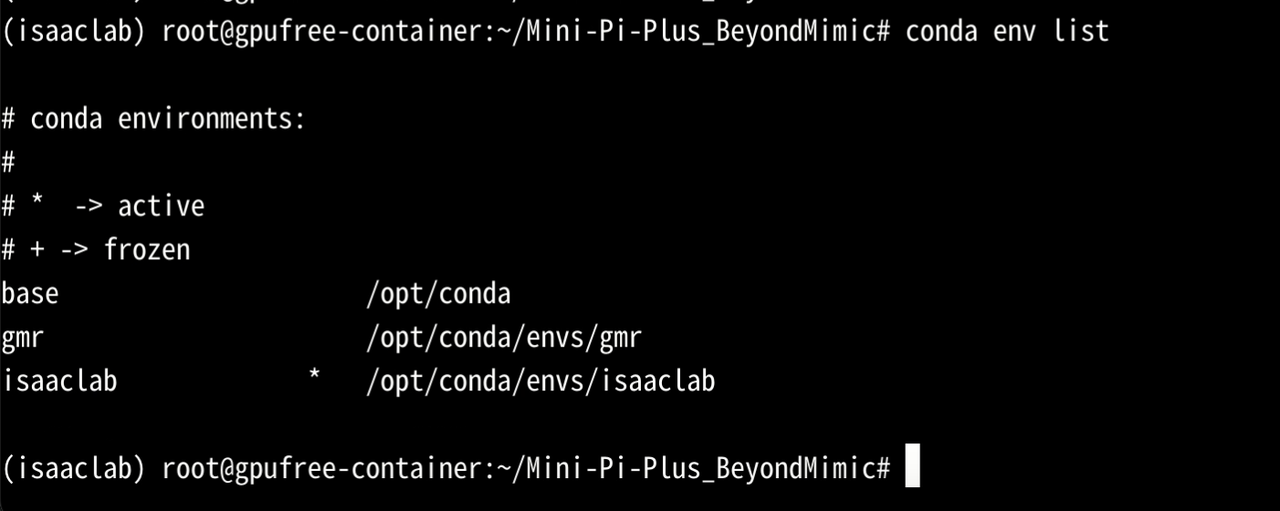
环境数量:双 Conda 环境(gmr + isaaclab),无需额外安装
1.3 核心环境详情(镜像内置,无需手动配置)
| 环境名称 | 用途 | 核心依赖 | 激活命令 |
|---|---|---|---|
| gmr | BVH/CSV 数据处理、动作重定向 | numpy、pandas、bvh-python | conda activate gmr |
| isaaclab | 训练、仿真、NPZ 处理、模型导出 | IsaacLab、MuJoCo、RSL-RL、ONNX | conda activate isaaclab |
1.4 工作目录说明(所有操作的核心目录)
所有命令必须在 ~/Mini-Pi-Plus_BeyondMimic 目录下执行,这是镜像预设的工作目录,包含所有脚本、模型、数据文件。
进入工作目录(每次登录服务器后,第一步必须执行):
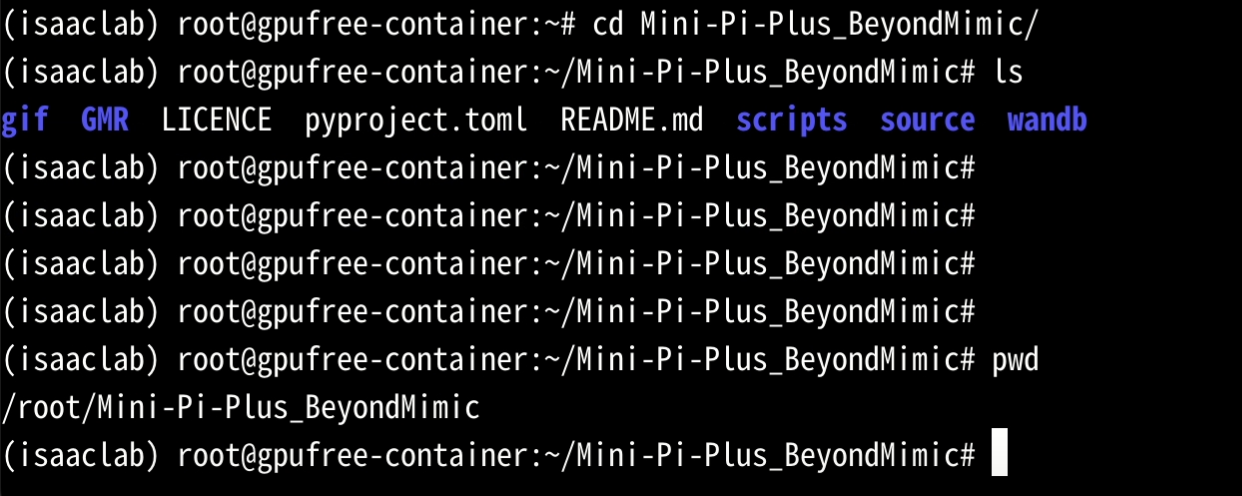
工作目录结构(关键路径,无需记忆,仅作参考):
二、完整训练流程(6步标准操作,可直接复制执行)
温馨提示:每一步执行完成后,确认无报错再进行下一步;所有命令已自动包含工作目录切换,无需额外执行 cd 命令。
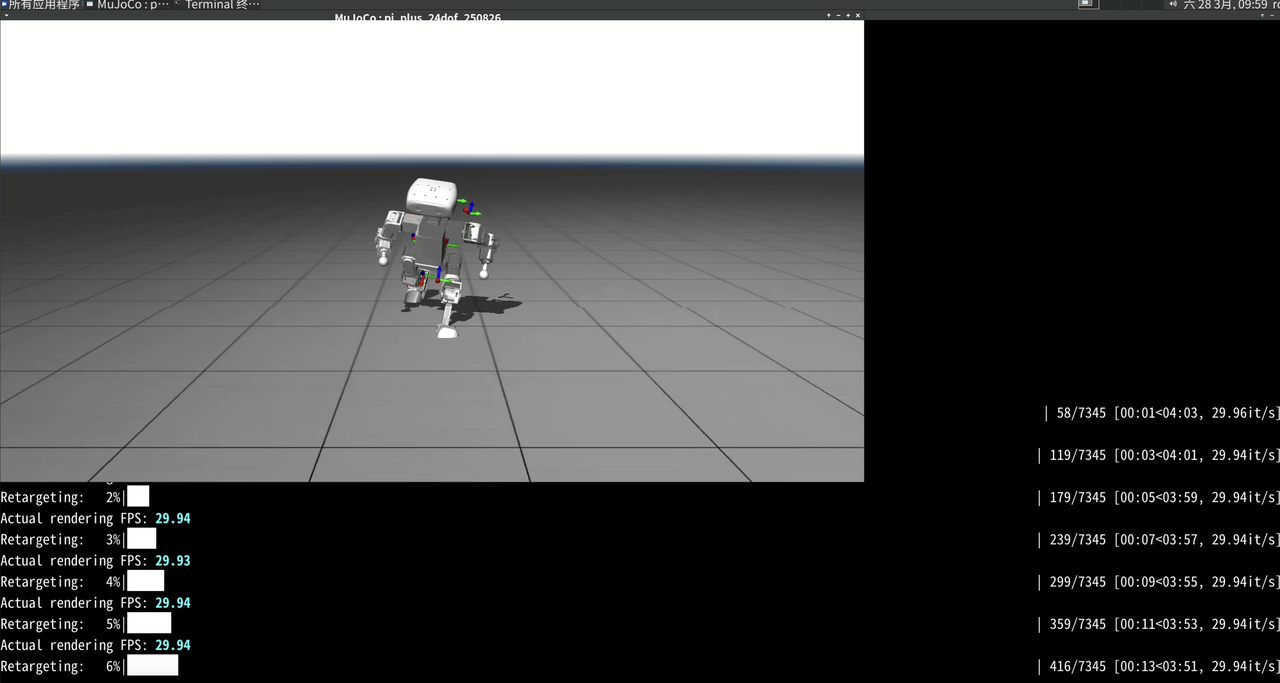
步骤 1:BVH 动作 → 机器人 CSV(gmr 环境)
功能:将人体 BVH 动作文件,重定向为高擎机器人可识别的 CSV 轨迹文件,适配 pi_football 机器人模型。
执行结果:工作目录下生成 fight1_subject2.csv 文件,无报错即成功。

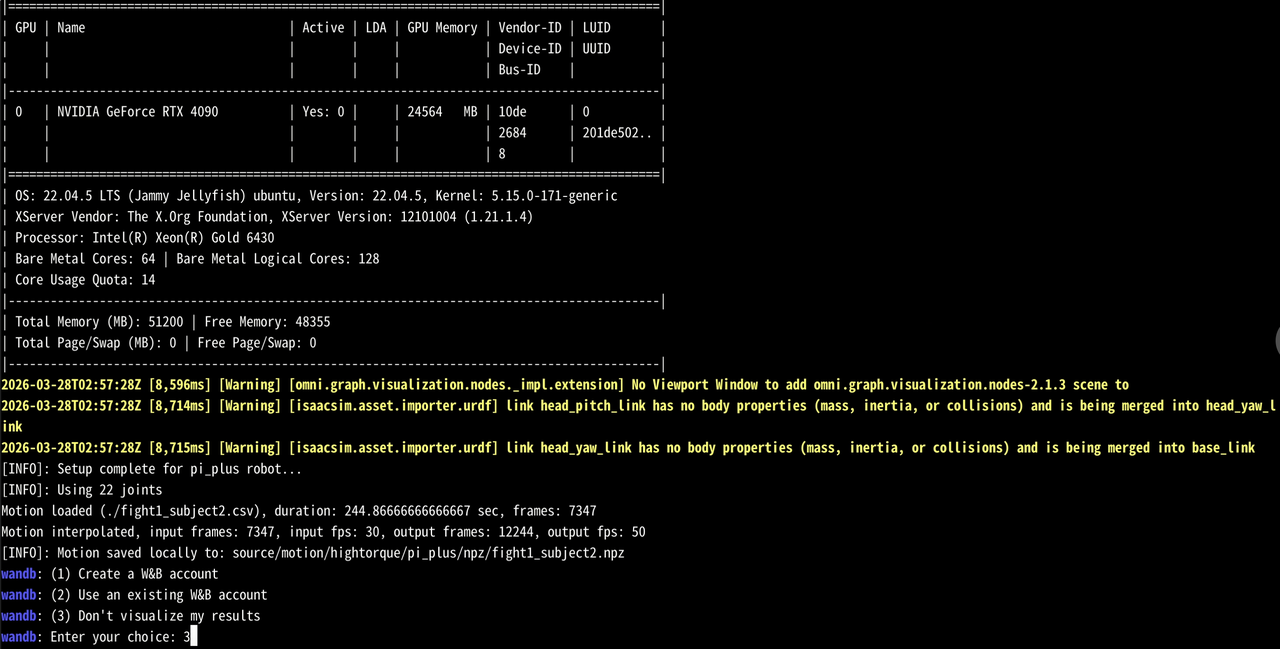
步骤 2:CSV → NPZ 训练文件(isaaclab 环境)
功能:将 CSV 轨迹文件,转为 IsaacLab 训练所需的标准 NPZ 格式,适配 pi_plus 机器人模型,用于后续强化学习训练。
【重要修改】需提前修改
csv_to_npz.py脚本中的对应代码,避免后续训练报错,具体修改如下:原代码片段:
motion = motion.to(torch.float32).to(self.device)
self.motion_base_poss_input = motion[:, :3]替换为:
motion = motion.to(torch.float32).to(self.device)
# 剔除第一列的 frame 数据,让后续所有索引完美对齐motion = motion[:, 1:]self.motion_base_poss_input = motion[:, :3]
执行结果:source/motion/hightorque/pi_plus/npz/ 目录下生成 fight1_subject2.npz 文件,无报错即成功。

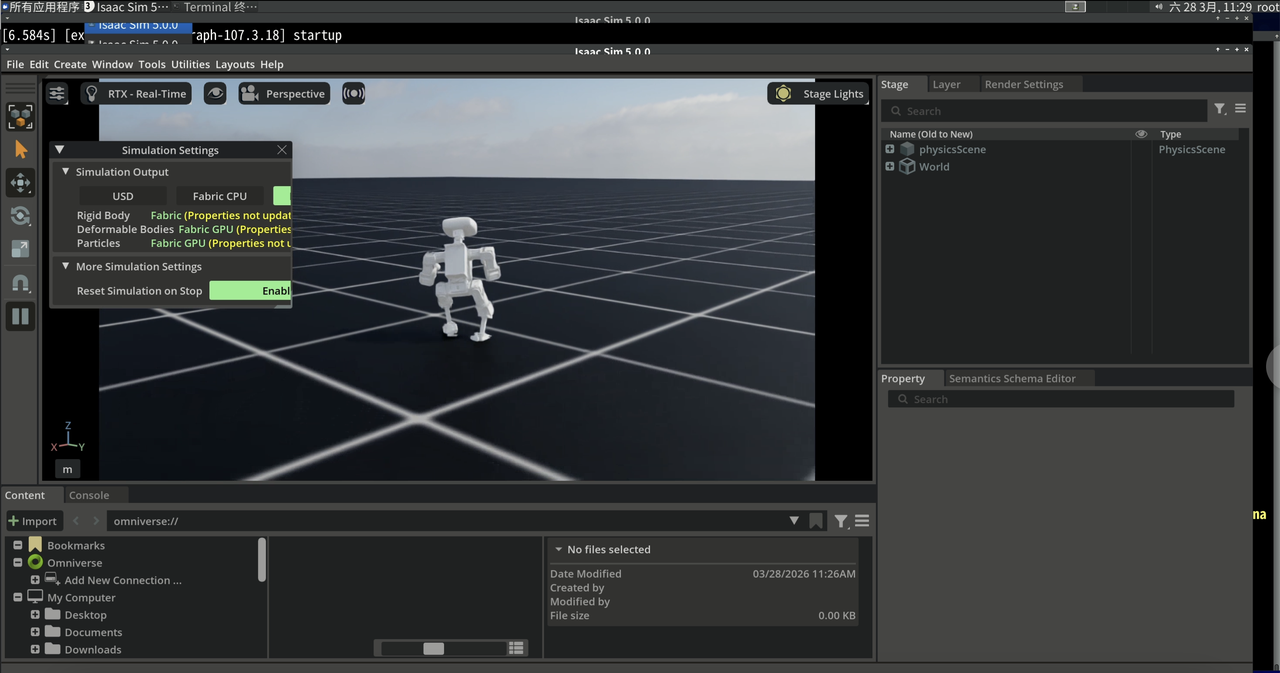
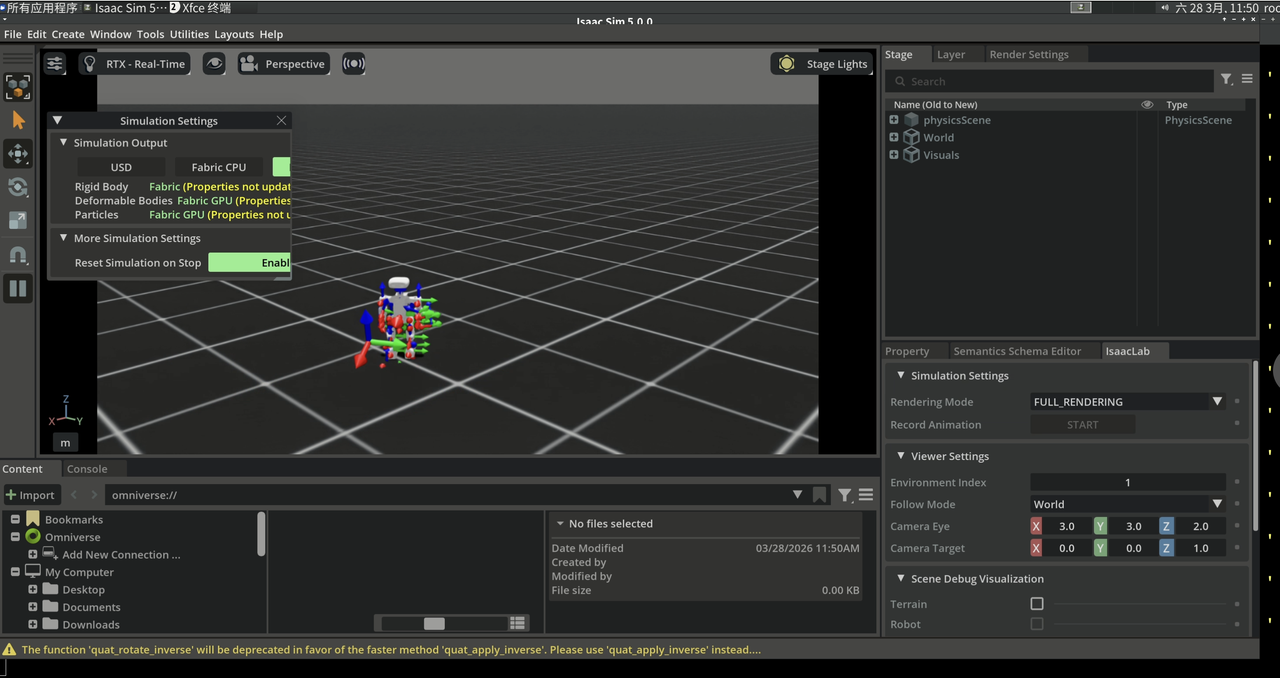
步骤 3:回放 NPZ 验证动作(isaaclab 环境)
功能:在 IsaacLab 仿真环境中,回放生成的 NPZ 动作文件,检查动作是否正常、是否适配 pi_plus 机器人模型。
执行结果:弹出仿真窗口,机器人正常执行动作(无卡顿、无关节错位)即验证通过;关闭窗口可继续下一步。
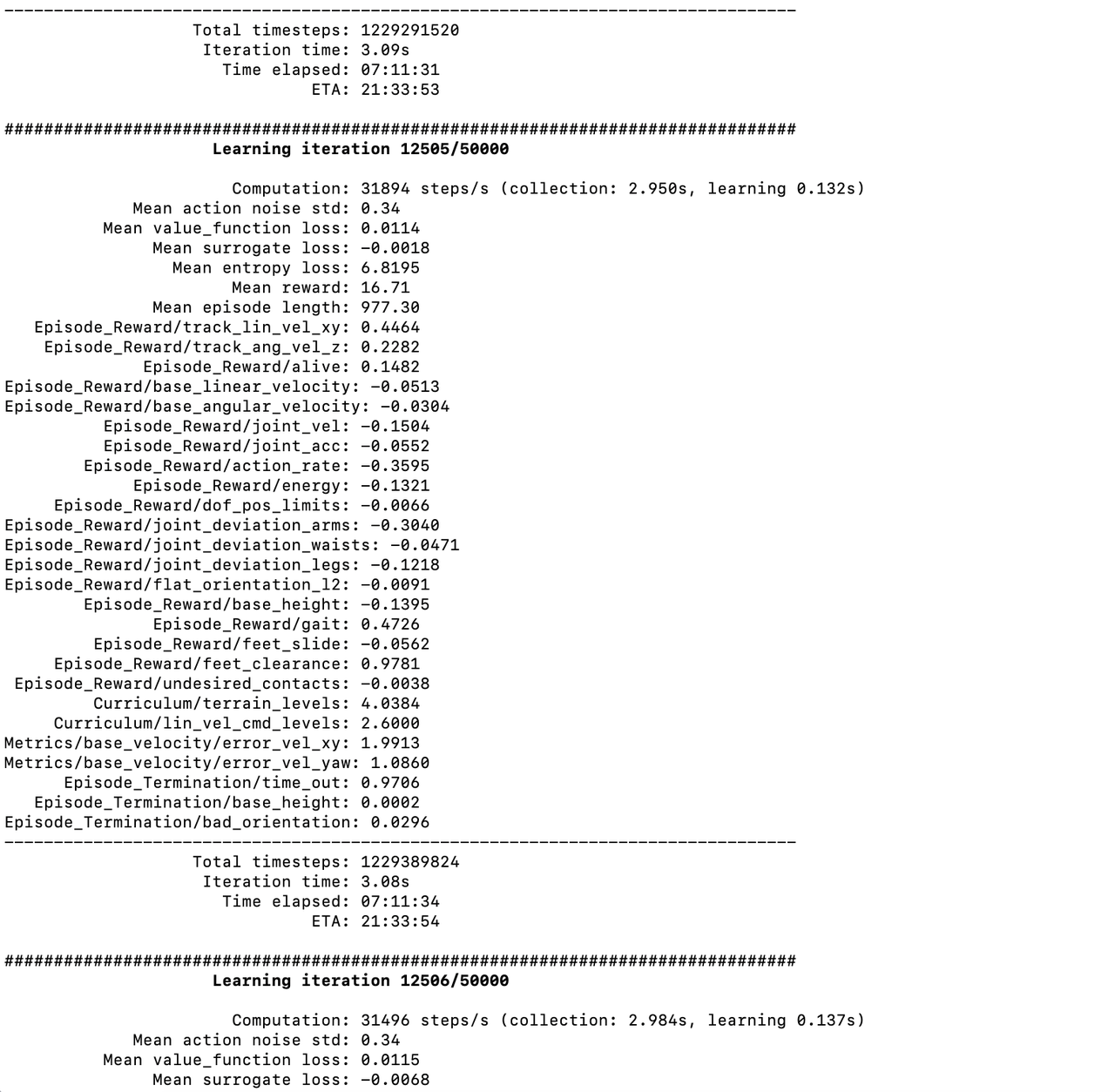
步骤 4:强化学习训练(核心步骤,isaaclab 环境)
功能:使用 BeyondMimic 算法 + RSL-RL 框架,训练机器人运动跟踪策略,核心步骤,耗时较长(根据配置不同,耗时 1-4 小时)。
关键说明:
--headless:后台训练(无图形界面),适合远程服务器,可关闭终端不影响训练;训练日志:实时输出训练进度,包含损失值、成功率等指标;
模型输出:训练完成后,模型文件保存至
logs/rsl_rl/pi_plus_flat/时间戳/目录。
步骤 5:训练效果回放测试(isaaclab 环境)
功能:加载训练好的模型,在仿真环境中回放,查看机器人运动跟踪效果,验证训练是否达标。
注意:logs/rsl_rl/pi_plus_flat/2026-03-28_11-47-10/ 需替换为你实际的训练日志目录(训练过程中会显示具体路径)。
执行结果:弹出仿真窗口,机器人可精准跟踪 NPZ 动作,无明显偏差即训练达标。
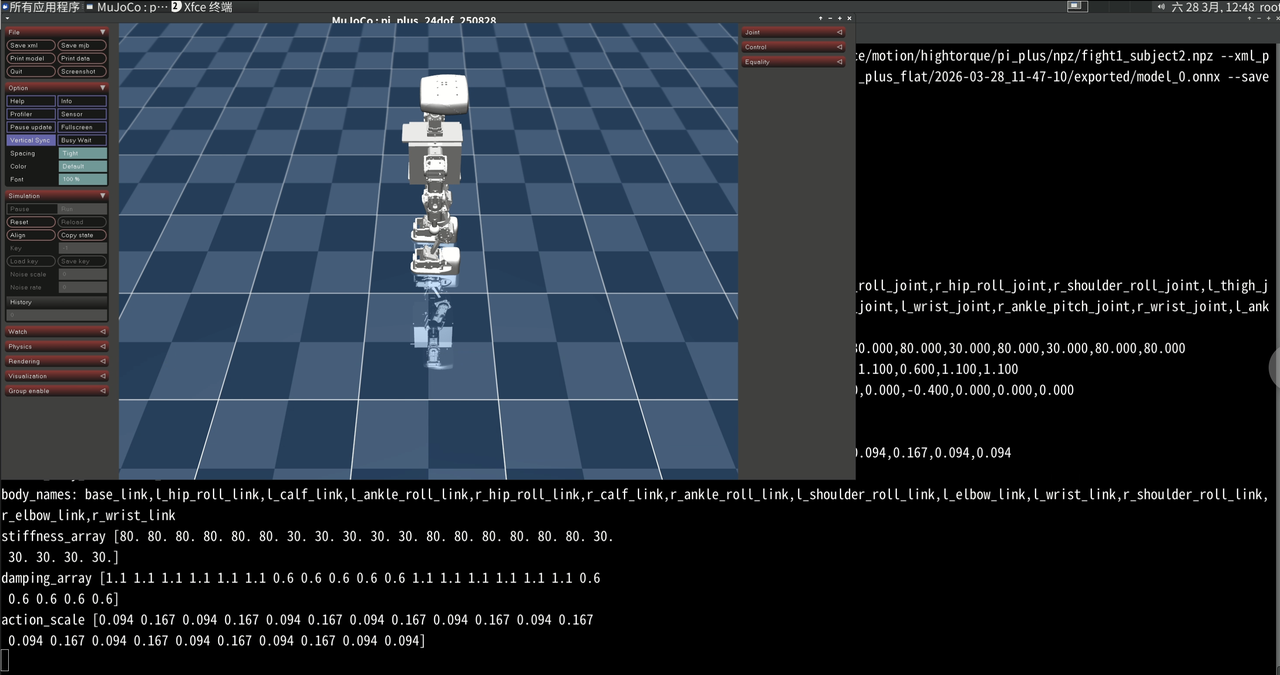
步骤 6:Sim2Sim 推演 + 导出 JSON(真机部署用,isaaclab 环境)
功能:将训练好的 ONNX 模型,结合 NPZ 动作文件,进行 Sim2Sim 推演,并导出可用于真机部署的 JSON 动作文件。
执行结果:source/motion/hightorque/pi_plus/json/ 目录下生成 fight1_subject2.json 文件,可直接用于高擎机器人真机部署。